















 49 / 52
49 / 52

49
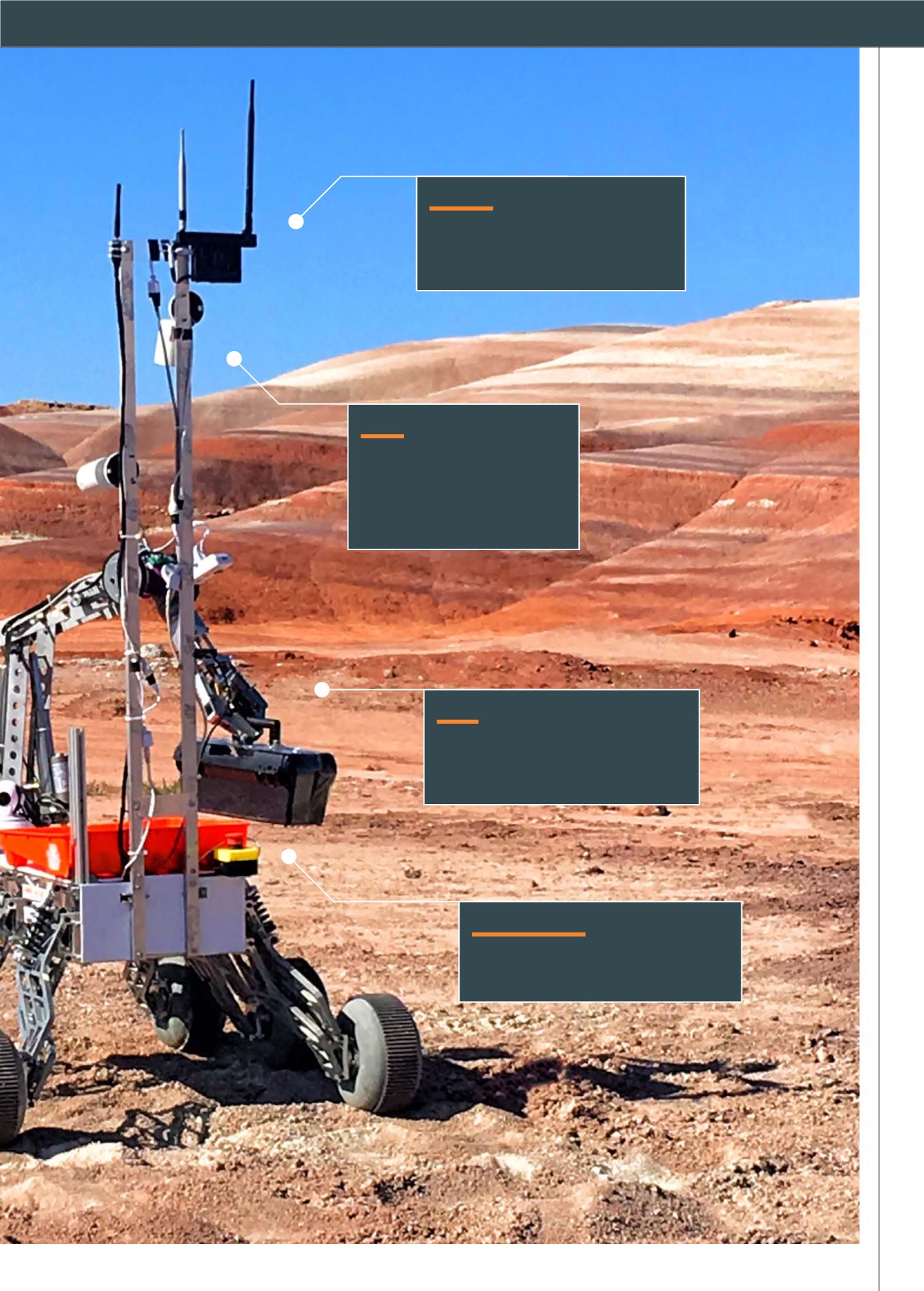
Elektronik
Rover’ın yer istasyonu ile haberleşmesi, üzerinde
bulunan bir “router” ve anten vasıtasıyla sağlanıyor.
Motor, robot kol ve sensörler, farklı mikroişlemciler
tarafından kontrol ediliyor.
Bilimsel araştırma
Rover’ın üzerinde bulunan enstrümanlarla taş ve toprak
numunelerinin nem ve sıcaklık değerleri ölçülebiliyor.
Araç, atmosferik verileri de toplayabiliyor.
Tutucu
Robot kolun ucundaki tutucu, şekil değiştirebilen
parmaklarıyla farklı cisimleri başarıyla kavrayabiliyor.
İki motor, tutucunun farklı eksenlerde hareket
etmesini sağlıyor.
Yazılım
Rover’ın yer istasyonundan yönetilmesi ve
otonom sürüş yapabilmesi için karmaşık
bir yazılım kullanılıyor. Araç, kamera
bağlantısının kopması durumunda arazinin
topografik harita verilerini kullanarak pilota
kör sürüş imkânı da sunuyor.